Если повернуть руль до упора, выйти из машины и посмотреть на нее спереди, можно заметить, что колеса повернуты под разными углами: одно вывернуто сильнее, чем другое. Но это не неисправность, а наоборот, точный инженерный расчет, который в этом году празднует свой юбилей – ему исполняется ровно 200 лет. Почему рулевое управление так спроектировано, и почему нельзя было бы сделать иначе?
Зачем колеса поворачиваются на разный угол?
Ответ на этот вопрос лежит на поверхности: представьте себе, что автомобиль движется по кругу по часовой стрелке – в этом случае окружность, по которой будет двигаться переднее правое колесо, будет меньше, чем окружность, описываемая левым. Соответственно, при постоянной скорости автомобиля колеса на одной оси будут вращаться с разной скоростью. Если бы колеса были повернуты на одинаковый угол, то внутреннее колесо, стремясь двигаться так же, как наружное, постоянно проскальзывало бы – при этом поведение автомобиля в повороте было бы непредсказуемым, а износ шин – катастрофическим. Соответственно, для решения этих проблем и обеспечения правильного движения колес по их траектории они и поворачиваются на разные углы.
 Вам будет интересно:"Ниссан-Кашкай": клиренс, технические характеристики и фото
Вам будет интересно:"Ниссан-Кашкай": клиренс, технические характеристики и фото

Как рассчитана геометрия движения колес?
Сама проблема проскальзывания внутреннего колеса в повороте была актуальна задолго до массового распространения автомобилей – ведь те же проблемы были и у конных повозок. Собственно, именно на конной повозке рулевое управление, решающее эту проблему, и дебютировало: в 1817 году его изобрел Георг Ланкеншпергер, а в 1918 году запатентовал в Англии его агент Рудольф Аккерман. С тех пор принцип поворота управляющих колес на разные углы в повороте так и называется – принцип Аккермана.
Чтобы обеспечить нужные углы поворота колес, геометрия рулевой трапеции рассчитывается по единой условной схеме. В ней поперечная рулевая тяга короче управляющей оси и смещена за нее, а поворотные рулевые рычаги лежат на линии между осью поворота передних колес и центром задней оси автомобиля. Для того, чтобы проще было понять это сложное на первый взгляд объяснение, достаточно взглянуть на простую схему ниже.
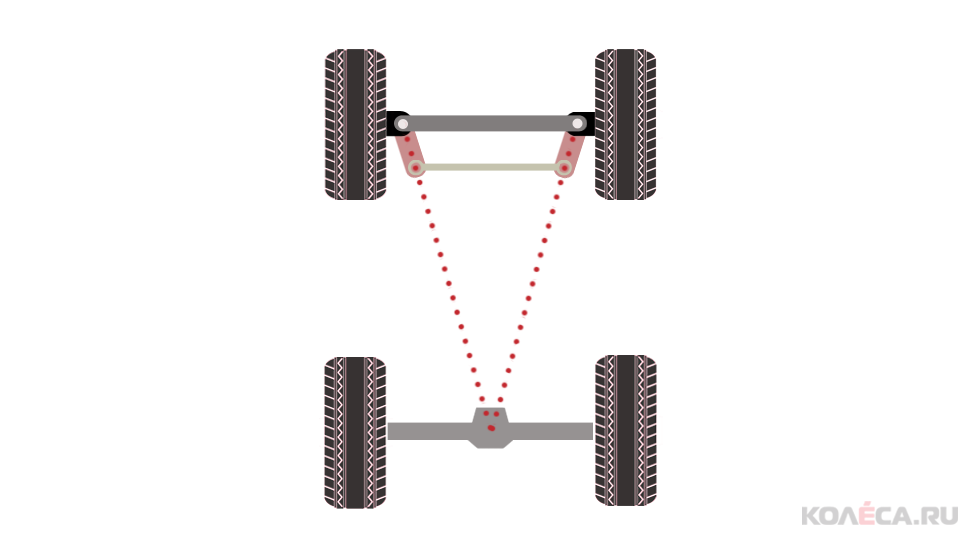
Соответственно, при повороте колес в такой схеме они оказываются повернуты на разные углы – внутреннее поворачивается больше, а наружное меньше. При этом центры окружностей, по которым движутся колеса, совпадают.
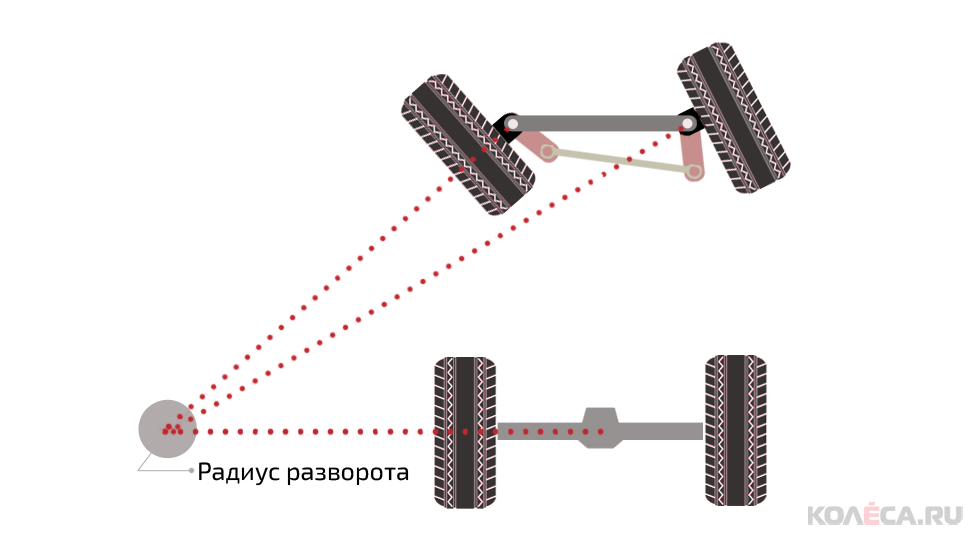
Стоит отметить, что изображение выше – схематическое, и рулевое управление автомобиля, разумеется, сложнее, чем то, что изображено на схеме. Однако общая геометрия справедлива для всех «гражданских» автомобилей.
В автоспорте подход может меняться: к примеру, на некоторых гоночных автомобилях ситуация с углами поворота колес может быть даже обратной для компенсации бокового увода колеса в скоростных поворотах, а в дрифте передние колеса стараются сделать параллельными даже в поворотах, чтобы снизить износ передних шин при постоянном движении в управляемом заносе. Но это – крайности, не актуальные для обычных серийных машин.